国防工业的迅速发 展 ,对 执行器 提 出 了更 高 的 要求。要求执行器能够及时响应 ,尤其在恶劣 的环 境 下需具 有很 好 的生存 能力 ,如 能承受 机械 振动 、承 受机械冲击 、承受高加速度环境 的严酷考验等。与 传统液压系统相 比,电动缸 系统不需要液压 系统复 杂的管路系统 、伺服 阀、泵等组件 ,有效避免 了油液 泄 露 问题 ,具 有体 积 小 、质 量 轻 、低 噪声 、易 维 护 、效 率高等优势。电动执行器替代传统液压系统将成为 工 业发展 的趋势 ,电动 缸也 越 来 越 多 地应 用 于工 业 生 产线 、军用 载具 、防务 系 统 等 各 行业 ,典 型应 用 还 有 六 自由度平 台 、地震模 拟 台等 。
电动缸系统利用伺服 电机的闭环控制特性 ,其 控 制 的关键 技术 在 于实 现 对 推 力 、速 度 和位 置 的精密 控制 ,利用 现代 运动控 制技 术 、数控 技术及 网络技 术实现程序化、网络化控制 。由于其控制 、使用的方 便性 ,将实现气缸和液压缸传动所不能实现的精密 运动控 制 。
1 电动缸系统建模与控制策 略研 究
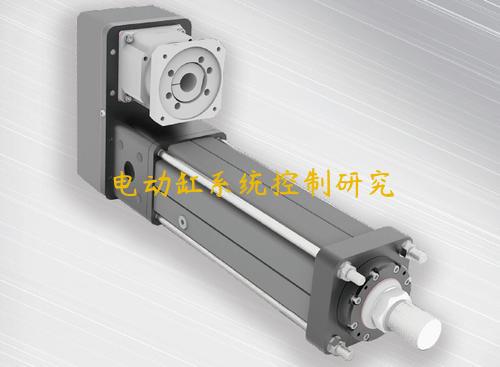
电动缸将电机 的旋 转 运动通 过丝 杠和 丝杠 副 的 机械运 动转 换为 推 杆 的直 线 运 动 ,可 实 现 远距 离 控 制和集 中控 制 。电动缸 系 统通 常使用 永磁 同步电机 (p erm anent m agnet synchronous m otor ,PM SM ) 作 为 电能 到 机 械 能 转 换 的 核 心 部 件 ,其 结 构 图 如 图 1 所示 。
伺 服控制主 要解 决 位 置 控 制 问题 ,要 求 系统 具 有 对位 置 指 令 准 确 的跟 踪 能 力 。对 于 伺 服 系 统 而 言 ,位置 指令 是一 个 随机变 量 ,系统必 须具有 良好 的 跟随性 能 ,才 能 准 确跟 踪 给 定 位 置 的变 化 。对 于调 速系统 ,通常给定信号为恒定值 ,这就要求系统具有 良好 的抗扰性能 ,以抵抗外界 扰动 引起的变化。控 制算法选择模块首先进行伺服控制,确保 电动缸推 杆 准确 跟踪 给定指 令 ,当推杆 到达 指定 位置 后 ,进 行 恒转 速控 制 ,以实 现 电动 缸集 中力 的 闭环控 制 。
速度环采用 PI 调节 ,限幅输出作为转矩电流的 给定值 。检测到的 PM SM 定子三相电流经 Clark 变换和 Park 变换 ,得到同步旋转 dq 轴系的电流 i ,i ,/‘~qref,t’dref与 i。,id 的差值作为 电流调节 器的输 入 , 电流调节器的输出经过 2/3 变换模块 ,得 到定子三 相电流给定值 i i i ,电流环采用 PI控制。将 检测 到的 PM SM 定子三 相电流值 i ,i ,i 分别 与i ,ib /%。ref的差值作为脉宽调制 (Pulse W idth M od— ulation ,PW M )控制器的输入 ,PW M 控制器输出六路 信号 ,作为三相全桥逆变器的控制信号 ,从而驱动电 机运行 。PW M 控制器采用滞环比较控制 ,迫使各相 电流 it( :a,b,c)在滞环宽度 2A hj(Ahj:Inax( 一 ij,设定的最大电流偏差 ) 内呈锯齿状地不断跟踪 给定 电流 的波形 ,从 而 有效 控制 各相 电流 的 偏 差 。
2 仿 真与分析
为 验证 上 述 电动缸 集 中力 控 制 系统 的有 效性 , 利用 M atlab/sim ulink 软件建立 系统仿真模 型(模型 图略) ,电动缸驱动 系统基 于永磁 同步电动机转子 磁场定向矢量控 制。系统构建 采用模块化建模 思 想 ,将系统分割为多个功能独立的子模块 ,其 中主要 包括 :控制选择模块 (伺服控制模块、推力 闭环控制 模块 ) ,速度控制模块 ,3/2 变换模块 、2/3 变换模块 以及 PW M 逆 变控制 模 块 等 。电 动缸 控 制 系统 的参 数 如表 1 所示 。
外 环控 制 选择 器 的控 制原 理 如 图 3 所 示 ,电动 缸 系统 首先进 行伺 服 控 制 ,电动 缸 推杆 按 照 给定 指 令 到达 指定位 置且 进入 稳态 后 电动执 行器需 按 照给 定力进行加载,此时控制选择器将根据给定推力进 行推 力 闭环控 制 。位 置 闭 环 采用 比例 调 节 器 ,推 力 闭环 采用 PI 控 制 ,选 择 控 制 器 模 块 输 出为 转 速 参 考值 。
本文链接:http://www.gzlhdg.com/sfddgzs106.html
